МУ — М-101 (Математический маятник), страница 2
PDF-файл из архива «Математический маятник», который расположен в категории » «. Всё это находится в предмете «физика» из 2 семестр, которые можно найти в файловом архиве МГТУ им. Н.Э.Баумана. Не смотря на прямую связь этого архива с МГТУ им. Н.Э.Баумана, его также можно найти и в других разделах. .
Просмотр PDF-файла онлайн
Текст 2 страницы из PDF
Значения коэффициентов t p , f приведены в таблице 3.Таблица 3.Значения коэффициентов t p , ff = n −1P = 0.9P = 0.95P = 0.99P = 0.99916.3112.7163.66636.622.924.309.9331.632.353.185.8412.942.132.784.508.652.022.574.086.961.942.453.715.9671.902.373.505.481.862.313.365.0491.832.263.254.7810812.233.174.6При вычислении погрешности по формуле (12) значение доверительной вероятности P принять равным P = 0.95 .83. Используя данные строки 6 таблицы 1 для каждого значения длины маятникаl получить и занести в таблицу 1 (строка 8) оценку значения ускорения сво-бодного падения g с помощью равенства2 2π g = l .T(13)4. С помощью равенств, аналогичных равенствам (11) и (12) вычислить среднеезначение g и погрешность ∆g , принимая P = 0.95 . Результат записать в видеg эксп. = g ± ∆g .Сравнить полученный результат с табличным значением.5. Пользуясь формулой (7) и табличным значением ускорения свободного па-дения g , построить на миллиметровой бумаге по точкам график теоретическойзависимости периода колебаний маятника от его длины.3. На том же графике нанести найденные средние значения периодов колебанийи погрешности измерения.4. На отдельном графике построить, пользуясь данными таблицы 2 зависимостипериодов колебаний маятника от амплитуды колебаний. По оси абсцисс откладывать значения sin 2α.2Контрольные вопросы.1. Какое движение механической системы называется колебательным? Что называется периодом и частотой колебаний?2. Какая система называется математическим маятником?3. Какие колебания называются гармоническими? Что такое амплитуда колебаний.4. Какие колебания называются изохорными? Являются ли колебания математического маятника изохорными? При каком условии колебания математического маятника можно считать изохорными?95. Пользуясь формулами (9) и (10) оценить погрешность оценки периода колебаний математического маятника с помощью формулы (7) при углах отклонения α = 45°, 60° и 70° .6. Полагая погрешности измерения периода колебаний, длины маятника и угламаксимального отклонения равными соответственно ∆T , ∆l и ∆α , записатьформулы для косвенной погрешности измерения ускорения свободного падения g с использованием равенств (7) и (10).7. Учитывая, что радиус шарика r = 16 мм , его масса m = 152.7 г , а расстояниеот точки подвеса до центра тяжести l = 30 см , оценить относительную погрешность, которую дает формула периода малых колебаний математического маятника (7) по сравнению с формулой периода малых колебаний физического маятникаI.mglT = 2πПри какой длине маятника эта погрешность будет превышать 5%.ПриложениеЧтобы найти зависимость периода колебаний от амплитуды, запишем закон сохранения энергии для колебаний математического маятника с конечнойамплитудой21 dα l + g ( cos α 0 − cos α ) = 0 ,2 dt (П 1)извлечём из него квадратный кореньdα2g=( cos α − cos α0 )dtlи выполним разделение переменныхdt =dα2g( cos α − cos α0 )l.(П 2)Таким образом, период колебаний маятника определяется интегралом:10lT =42gα0dαl=2gcos α − cos α 0∫0α0∫0dα.ααsin 2 0 − sin 222(П 3)Полученный интеграл относится к классу интегралов эллиптического типа и неможет быть выражен через элементарные функции. Чтобы вычислить этот интеграл в виде сходящегося тригонометрического ряда, сделаем замену переменных с помощью равенства:sinαα= u sin 0 .22(П 4)Так как угол отклонения α меняется в интервале 0 ≤ α ≤ α 0 , то 0 ≤ u ≤ 1 . Дифференцирование равенства (П 4) дает1ααcos dα = sin 0 du .222(П 5)Подставляя равенства (П 4) и (П 5) в (П 3), получим,1lT =4g ∫0du(1 − u 2 )(1 − k 2u 2 ),(П 6)α0, кроме того, мы учли, что cos ( α / 2 ) = 1 − k 2 u 2 .2Так как на всем интервале интегрирования k 2u 2 < 1 , то функциюгде k = sin(1 − k u )2 2 −1/ 2можно разложить в ряд∞1 2 2 1⋅ 3 4 41 ⋅ 3 ⋅ … ⋅ (2n − 1) 2 n 2 n=1+ k u +k u +…+k u + … = ∑ cn k 2 nu 2 n ,22⋅42 ⋅ 4 ⋅ … ⋅ 2nn =01 − k 2u 21гдеc0 = 1,cn =1 ⋅ 3 ⋅ … ⋅ (2n − 1)2 ⋅ 4 ⋅ … ⋅ 2n(n >0) .Подстановка этого выражения в (П 6) даёт следующее равенствоl ∞u 2 n du2nT =4∑ cn k ∫ 1 − u 2 ,g n=001из которого, принимая во внимание известное соотношение111∫0u 2 n du1 − u2= cnπ2,получимl ∞ 2 2nT = 2π∑ cn k .g n=0В развернутом виде это выражение примет видlT = 2πg 1 2 2 α 0 1 ⋅ 3 2 4 α 0++ . 1 + sin sin222⋅422 1 ⋅ 3 ⋅ . ⋅ (2n − 1) 2 n α0++sin. 2 2 ⋅ 4 ⋅ . ⋅ 2n (П 7)Ограничиваясь членами второго порядка малости, получим приближенное выражение зависимости периода колебаний от амплитудыlT = 2πg 1 2 2 α 0 1 + sin.2 2 (П 8)СПИСОК ЛИТЕРАТУРЫ1. Савельев И.В. Курс общей физики. Механика. М.: Физматлит, 1990.2. Сивухин Д.В. Курс общей физики: В 5 т. Т. 1: Механика. М. Наука. 1990.3. Беззубов Ю.И., Иванова Т.М. Методические указания по выполнению графических работ в физическом практикуме, М., МГТУ, 1986.4. Савельева А.И., Фетисов И.Н. Обработка результатов измерений при проведении физического эксперимента. Методические указания к лабораторной работе М-1 по курсу общей физики. М., МГТУ, 1999.ОглавлениеВведение. 1Теоретическая часть. 1Экспериментальная часть. 5Схема установки. 5Порядок выполнения работы . 6Обработка результатов измерений. . 8Контрольные вопросы. . 9Приложение . 10СПИСОК ЛИТЕРАТУРЫ. 1212.
Компьютерная обработка результатов изучения изохронности колебаний физического маятника с помощью пакета Microsoft Excel Текст научной статьи по специальности «Физика»
В работе студенты изучают явление изохронности колебаний физического маятника в рамках физического практикума и проводится обработка полученных при наблюдениях результатов с помощью программы Microsoft Excel.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по физике , автор научной работы — Низамов Александр Жакферович
Точное аналитическое решение нелинейного дифференциального уравнения для случая малых колебаний физического маятника
Влияние вращательных вибраций на поведение математического маятника
ОБЛАСТИ ПРИТЯЖЕНИЯ МАЯТНИКА ПОД ДЕЙСТВИЕМ КОСОЙ ВИБРАЦИИ ТОЧКИ ПОДВЕСА
ОБРАТНАЯ ЗАДАЧА СТАБИЛИЗАЦИИ СФЕРИЧЕСКОГО МАЯТНИКА В ЗАДАННОМ ПОЛОЖЕНИИ ПОД ДЕЙСТВИЕМ КОСОЙ ВИБРАЦИИ
Угол отклонения, период колебаний и погрешность измерения центрального момента инерции физического маятника
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Текст научной работы на тему «Компьютерная обработка результатов изучения изохронности колебаний физического маятника с помощью пакета Microsoft Excel»
Компьютерная обработка результатов изучения изохронности колебаний физического маятника с помощью пакета Microsoft Excel
В работе студенты изучают явление изохронности колебаний физического маятника в рамках физического практикума и проводится обработка полученных при наблюдениях результатов с помощью программы Microsoft Excel.
Ключевые слова: физический маятник; изохронность; колебания; результаты наблюдений.
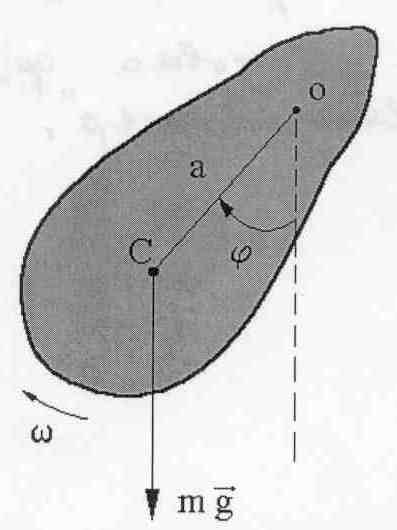
Физическим маятником называется твердое тело, которое может качаться вокруг неподвижной горизонтальной оси. Кинетическая энергия качающегося физического маятника определяется выражением
где I — момент инерции маятника относительно оси А, ф — угол между вертикалью и текущим положением оси маятника, проведенной между осью вращения и центром масс.
Потенциальная энергия физического маятника равна Епот = m g h, где h — высота поднятия центра масс С над его самым нижним положением. Обозначим а расстояние между центром масс С и точкой подвеса А. Тогда
Епот = m g a (1 — C0S фХ
Закон сохранения механической энергии позволяет получить уравнение:
ф = 2 (m g a /Г) (cos ф — cos ф0)
Если ввести обозначение
уравнение примет вид:
ф2 = 2 (g /1) (cos ф — cos ф0)
его можно преобразовать к следующему виду с помощью выражения cos ф = 1 — 2 sin2 (ф / 2)
ф2 = 4 (g / О (sin2 (фо / 2) — sin2 (ф / 2)) (2)
Взяв корень квадратный из обеих частей уравнения и разрешив его относительно d t и интегрируя по ф, найдем период колебаний маятника Т, как учетверённое время прохождения интервала углов от ф = 0 до ф = ф0. При интегрировании удобно ввести новую переменную интегрирования и = sin (ф / 2) / sin (ф0 / 2). В результате получим
где введено обозначение k = sin (ф0 / 2). Входящий сюда интеграл называется полным эллиптическим интегралом первого рода. Его можно представить в виде бесконечного ряда. Так как |k sin и|
Г . 2 • 2 ч 1,2-2 1 х 3
1 / V1 — k sin и = 1 +— к sin и +—
/4*4 ,1 Х 3 Х 5 / 6 • 6
Этот ряд равномерно сходится, а потому его можно интегрировать почленно. Сделав это, получим
2 ^ 2 х 4) 2 ^ 2 х 4 х 6) 2
При малых амплитудах колебания ф0 эта формула переходит в формулу
для математического маятника длины I.
Формула (4) определяет приведенную длину математического маятника период колебаний которого равен периоду колебаний физического маятника.
Выражение в квадратных скобках формулы (3) определяет нелинейную зависимость от амплитуды
f (ф) = 1 + 4 sin2 ф> +
1 х 3 f . 4 Ф0 (1 х 3х 5 ^2 . 6 ф0
2 х 4 ) 2 ^ 2 х 4 х 6 ) 2
Если период колебаний физического маятника не зависит от амплитуды колебаний, то такие колебания называются изохронными. Мы видим, что малые колебания физического маятника изохронны. Колебания приближенно изохронны, когда угловая амплитуда колебаний не превышает нескольких градусов. При больших амплитудах изохронность нарушается. Если изобразить выражение (5) в виде графика, то получим зависимость выражения от ф0. Из графика видно, что при изменении ф0 в пределах от 0 до 30 градусов изменение множителя составляет менее 10 процентов.
Рис. 1. Зависимость от амплитуды.
На свойстве изохронности колебаний маятника основано его применение в часах. В качестве физического маятника используется однородный цилиндрический стержень длины Ь (рис. 2). На стержне закреплена опорная призма, острое ребро которой является осью качания маятника. Призму можно перемещать вдоль стержня, меняя, таким образом, расстояние а от точки опоры маятника О до его центра масс С (рис. 2).
Согласно теореме Гюйгенса-Штейнера момент инерции маятника I:
где т — масса стержня. С учетом выражения (6) формула (4) для периода колебаний примет вид
Изохронные колебания — колебания, период которых не зависит от амплитуды колебаний.
Для доказательства изохронности достаточно показать, что для различных ф0 период колебаний физического маятника неизменен, либо мало меняется.
Измерения следует проводить в таком порядке: выбирается конкретное неизменное значение длины маятника затем физический маятник отклоняется на угол ф0 от положения равновесия и отпускается, производится несколько (п) полных периодов колебания в процессе которых измеряется время Т^. Опыт повторяется несколько раз, при различных углах ф0 проводиться от трёх до пяти измерений значения Т^. Затем определяется время одного периода
колебаний Т = / п.
Это будет первая серия измерений. Для проверки формулы (4) необходимо провести измерения для малой длины маятника и для максимально большой при различных углах ф0 необходимо провести несколько таких серий.
В соответствии с формулой (6) приведенная длина маятника:
Предлагается сделать по пять таких серий измерений для четырех длин физического маятника, в качестве которых выбираются следующие четыре угла: ф0 = 50; ф = 100; ф = 150; ф = 200.
В качестве точных значений указанных величин, как и в случае математического маятника, принимаются их средние арифметические, вычисляемые по формуле (9):
где п — число измерении.
Тогда под погрешностью измерения будем подразумевать модуль величины максимального отклонения всех измеренных величин от их среднего арифметического. А именно, погрешность измерения времени падения А будем определять как
В формуле (10) индекс г = 1, 2, 3, 4, 5 пробегает все номера измерений соответствующих величин.
Обработку результатов измерений будем производить на компьютере в программе Microsoft Excel и продемонстрируем технологию необходимых при этом расчетов на конкретных результатах измерений.
В качестве примера рассмотрим следующие результаты измерений периода колебаний физического маятника, представленные в таблице 1, введенной в Microsoft Excel. Далее вычислим все Тср по каждому столбцу используя вставку статистической функции =СРЗНАЧ(В5:В9) (см. табл 2).
2 п номер измер серия 1 серия 2 серия 3 серия 4
4 ения Т, сек Т, сек Т, сек Т, сек
5 1 1,91500 1,95333 1,96333 1,99500
6 2 1,94833 1,94167 1,94333 2.01000
7 3 1,93667 1,94333 1,94667 1,99500
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
8 4 1,94333 1,92833 1,96833 1.96333
9 5 1,89500 1,96333 1,92667 2,00167
вю f. \ =СРЗНАН(В5:89)
2 п серия 1 серия 2 серия 3 серия 4
4 измер ения Т. сек Т, сек Т, сек Т. сек
5 1 1,91500 1,95333 1,96333 1,99500
6 2 1,94833 1,94167 1,94333 2.01000
7 3 1,93667 1,94333 1,94667 1,99500
8 4 1,94333 1,92833 1,96833 1,96333
9 5 1,89500 1,96333 1,92667 2,00167
10 Тср 1,92767 1,94600 1,94967 1,99300
Для построения графика зависимости Г от ф0 выделим оба столбца
со значениями ю. и Т
и используя мастер диаграмм построим график зависимости Тср от ф0, вставив названия графика и осей координат получим график представленный ниже
Проанализируем результаты измерений с различными длинами точки подвеса маятника а.
Данные измерений приведены в таблицах 3-5.
2 п серия 1 серия 2 серия 3 серия 4
4 измер ения Т, сек Т, сек Т, сек Т, сек
5 1 1.54667 1,58333 1,60500 1,62500
б 2 1.55667 1,56167 1,59833 1,59333
7 3 1,56333 1,57833 1,63667 1,61000
8 4 1,56833 1,59333 1,60500 1,60833
9 5 1,57833 1,58333 1,57833 1,62500
2 п серия 1 серия 2 серия 3 серия 4
4 измер ения Т, сек Т, сек Т, сек Т, сек
5 1 1,588333 1,615 1,588333 1,625
б 2 1,556667 1,603333 1,578333 1,578333
7 3 1,558333 1,563333 1,61 1,593333
8 4 1.573333 1.6 1,556667 1.593333
9 5 1,568333 1,551667 1,615 1,588333
2 п серия 1 серия 2 серия 3 серия 4
4 измер ения Т, сек Т, сек Т, сек Т, сек
5 1 1,588333 1,615 1,588333 1,625
6 2 1,556667 1,603333 1,578333 1,578333
7 3 1,558333 1,563333 1,61 1,593333
8 4 1,573333 1,6 1,556667 1,593333
9 5 1,568333 1,551667 1,615 1,588333
Смещен ил тонки подвеса 1 маятни серия 1 серия 2 серия 3 серия 4
ка от центра 2 . о -10° Ч>о -15° Ч> о -20°
3 ти а, м Т, сек Г, сек Т, сек Т, сек
4 0,1 1,9277 1,946 1,9497 1,993
5 0,2 1,5627 1,58 1,6047 1,6123
6 0,3 1,5153 1,528 1,5543 1,5627
7 0,4 1,569 1,5867 1,5897 1,5957
Расчёты Тср проведём так же, как и ранее по всем таблицам 4-5.
Сведём все данные о зависимости Тср от ф полученные по всем четырём таблицам 2-5 в одну таблицу 6 и построим все графики на одном по методике изложенной выше.
Используя мастер диаграмм построим все графики зависимости Тср от ф0 на одном графике для различных величин смещения центра масс а относительно оси подвеса маятника, а затем проведем через точки измерения линии тренда по линейному закону.
В легенде указана величина смещения точки подвеса физического маятника от центра масс а в метрах.
По всем графикам можно сделать вывод об изохронности колебаний физического маятника в пределах до 20 градусов. Из приведенных графиков видно, что отклонение Т от постоянной составляет не более 10%.
1. Сивухин Д. В. Общий курс физики / Д.В. Сивухин. — Т. 1: Механика. — М.: ФИЗ-МАТЛИТ, МФТИ, 2005. — 202 с.
2. Эйхенвальд А. А. Теоретическая физика / А.А. Эйхенвальд. — Ч. 3: Механика твёрдого тела. — М.: ГТТИ, 1932. — 218 с.
3. Шутов В. П. Эксперимент в физике. Физический практикум / В.П. Шутов, В.Г. Сухов, Д.В. Подлесный. — М.: ФИЗМАТЛИТ, 2005. — 184 с.
1. Sivuxin D. V. Obshhij kurs fiziki / D.V. Sivuxin. — Т. 1: Mexanika. — М.: FIZMATLIT, MFTI., 2005. — 202 s.
2. E’jxenval’dА. А. Teoreticheskaya fizika / А.А. E’jxenval’d. — Ch. 3: Mexanika tverdogo tela. — М.: GTTI, 1932. — 218 s.
3. Shutov V. P. E’ksperiment v fizike. Fuzicheskij praktikum / V.P. Shutov, V.G. Suxov, D.V. Podlesny’j. — М.: FIZMATLIT, 2005. — 184 s.
lab_mech1to8a / №1-06
11 9. Каким образом с помощью оборотного маятника определяется ускорение свободного падения в данной работе? 10. Задача. Однородный стержень длиной L совершает малые колебания в вертикальной плоскости вокруг горизонтальной оси, проходящей через его верхний конец. Найти период колебаний стержня. 8. Индивидуальные задания
Задание 1
1. Провести эксперимент, выбрав расстояние между опорными втулками 650 мм. 2. Составить уравнение малых колебаний физического маятника. Установить, как определяются амплитуда и фаза колебаний из начальных условий. 3. Измерить с помощью оборотного маятника ускорение свободного падения и указать абсолютную и относительную погрешности определения g.
Задание 2
1. Провести эксперимент, выбрав расстояние между опорными втулками 600 мм. 2. Вывести выражение для циклической частоты малых колебаний физического маятника. Показать, что малые колебания физического маятника являются гармоническими. 3. Измерить с помощью оборотного маятника ускорение свободного падения и указать абсолютную и относительную погрешности определения g. Задание 3 1. Провести эксперимент, выбрав расстояние между опорными втулками 670 мм. 2. Сформулируйте и докажите теорему Гюйгенса – Штейнера. Теоретически показать, что каждый физический маятник обладает свойством сопряженности точки подвеса и центра качания. Дать определение приведенной длины физического маятника.
12 3. Измерить с помощью оборотного маятника ускорение свободного падения и указать абсолютную и относительную погрешности определения g. Задание 4 1. Провести эксперимент, выбрав расстояние между опорными втулками 630 мм. 2. Доказать, что малые колебания физического маятника относительно осей, проходящих через сопряженные точки, являются изохронными. Показать, что точка подвеса маятника и его центр качаний лежат по разные стороны от центра масс. 3. Измерить с помощью оборотного маятника ускорение свободного падения и указать абсолютную и относительную погрешности определения g.
Лабораторная работа № 4 изучение колебаний физического маятника
Цель работы: изучение законов твердого тела относительно неподвижной оси на примере физического маятника.
Приборы и принадлежности: лабораторная установка “Физический маятник”, секундомер.
Физическим маятником называется твердое тело, которое может качаться вокруг неподвижной оси. Рассмотрим малые колебания маятника. Положение тела в любой момент времени можно характеризовать углом его отклонения из положения равновесия (рис.1.)
Запишем уравнение моментов относительно оси вращения  (ось проходит через точку подвеса
(ось проходит через точку подвеса перпендикулярно плоскости рисунка «от нас»), пренебрегая моментом сил трения
перпендикулярно плоскости рисунка «от нас»), пренебрегая моментом сил трения
, (1)
где  — момент инерции маятника относительно оси
— момент инерции маятника относительно оси вращения,
вращения, — угловая скорость вращения маятника,
— угловая скорость вращения маятника, — момент силы тяжести
— момент силы тяжести относительно оси
относительно оси ,
, — расстояние от центра тяжести тела
— расстояние от центра тяжести тела до оси вращения.
до оси вращения.
Учитывая, что и, принимая во внимание малость колебаний, перепишем уравнение (1) в виде
(2)
(мы учли, что при малых колебаниях , где угол выражен в радианах).
Уравнение (2) описывает гармонические колебания с циклической частотой
 и периодом
и периодом  . (3)
. (3)
Частным случаем физического маятника является математический маятник. Вся масса математического маятника практически сосредоточена в одной точке — центре инерции маятника. Примером математического маятника может служить маленький массивный шарик, подвешенный на длинной легкой нерастяжимой нити. Для математического маятника  ,
, , где
, где — длина нити, и формула (3) переходит в известную формулу
— длина нити, и формула (3) переходит в известную формулу
. (4)
Сравнивая формулы (3) и (4), заключаем, что период колебаний физического маятника равен периоду колебаний математического маятника с длиной , называемой приведенной длиной физического маятника:
. (5)
Экспериментальная установка. Методика эксперимента
В данной работе в качестве физического маятника используется однородный металлический стержень длины  . На стержне закреплена опорная призма, острое ребро которой является осью качания маятника. Призму можно перемещать вдоль стержня, меняя, таким образом, расстояние
. На стержне закреплена опорная призма, острое ребро которой является осью качания маятника. Призму можно перемещать вдоль стержня, меняя, таким образом, расстояние от точки опоры маятника
от точки опоры маятника до его центра масс
до его центра масс (рис.2)
(рис.2)

Согласно теореме Гюйгенса-Штейнера момент инерции маятника:
, (6)

где — масса стержня. С учетом выражения (6) формула (3) для периода колебаний примет вид

, (7)
 ,
,  .
.
В соответствии с формулой (5) приведенная длина маятника:
. (8)
Целью лабораторной работы является изучение колебательного движения физического маятника и, в частности, экспериментальная проверка теоретических соотношений (7) и (8). Для экспериментальной проверки зависимости периода  от величины
от величины , следует измерить периоды колебаний маятника при разных положениях опорной призмы. Результаты измерений удобно представить графиком зависимости
, следует измерить периоды колебаний маятника при разных положениях опорной призмы. Результаты измерений удобно представить графиком зависимости , где
, где , а
, а . В соответствии с формулой (7) эта зависимость имеет вид
. В соответствии с формулой (7) эта зависимость имеет вид

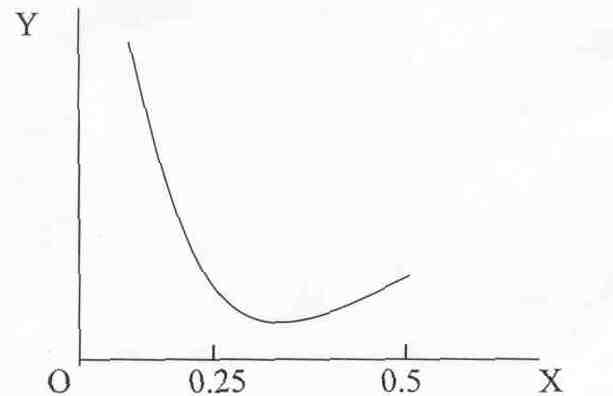
. (9)
График этой функции представлен на рис.3. Нетрудно показать, что функция (9) имеет минимум при
Измерения. Обработка результатов измерений
1.Определите диапазон изохронности колебаний. Напомним, что изохронностью колебаний называется свойство независимости периода от амплитуды колебаний. К изохронности колебаний мы приходим исходя из предположения их малости, что выражается заменой .
В связи с этим, формулой (3) для периода колебаний можно пользоваться в некотором диапазоне амплитуд колебаний  , называемым диапазоном изохронности. Для этого измерьте период колебаний для 5-6 значений амплитуды в пределах от 0° до 30°. Измерения проводите для одного положения опорной призмы, например соответствующему
, называемым диапазоном изохронности. Для этого измерьте период колебаний для 5-6 значений амплитуды в пределах от 0° до 30°. Измерения проводите для одного положения опорной призмы, например соответствующему . Результаты измерений занесите в таблицу 1:
. Результаты измерений занесите в таблицу 1: